Kaynaklama, modern imalatta önemli bir termal işlem yöntemidir. Kaynaklama teknolojisinin seviyesi, büyük ölçüde bir ülkenin endüstriyel gücünü yansıtır.
Bugün, kaynaklama robotları endüstriyel üretimde yaygın olarak kullanılmaktadır. Bunlar bilgisayar kontrolü, elektronik, sensörler ve akıllı sistemleri tek bir bütünleşik çözümde birleştirir. Sonuç olarak, kaynaklama kalitesini提高 eder, üretim verimliliğini artırır ve zorlu ortamlarda manuel emek ihtiyacını azaltır.
Ancak, bir kaynaklama robotu sadece tek bir makine değildir. Birkaç ana bileşenden oluşan tam bir sistemdir. Her bir parça, stabil ve doğru kaynaklamayı sağlamak için önemli bir rol oynar.
Hadi kaynaklama robot sisteminin ana bileşenlerini keşfedelim.
1. Robot Gövdesi: Temel Mekanik Yapı
Robot gövdesi, kaynaklama robotunun ana mekanik kısmıdır. Genellikle servo motorları tarafından çalıştırılan altı eksenli eklemlı bir robotdur.
Bu kısım şunları içerir:
- Mekanik kol
- Eklemler
- Sürüş birimleri
- Verme mekanizmaları
- İç yerleşik sensörler
Ana işlevi, kaynaklama torçunu doğru konuma ve açısına taşımaktır. Ayrıca kaynaklama yolunun doğru bir şekilde takip edildiğinden emin olur.
Altı eksenli tasarımı nedeniyle, robot üç boyutlu uzayda serbestçe hareket edebilir. İlk üç eksen konumu kontrol ederken, son üç eksen yönelimini kontrol eder.
Bu esneklik, robotun yüksek hassasiyetle karmaşık kaynaklama görevlerini yerine getirmesine olanak tanır.
Juchuang kaynaklama otomasyon sistemlerinde, robot gövdesi stabil hareket ve yüksek tekrarlanabilirlik için tasarlanmıştır, üreticilere tutarlı kaynaklama sonuçları elde etmeyi yardımcı eder.
2. Kontrol Sistemi: Robotun Beyni
Kontrol sistemi, kaynaklama robotunun çalışmasını yönetir.
Bilgisayar donanımı, elektronik bileşenler ve kontrol yazılımını içerir. Bu sistem, robot gövdesine komutlar gönderir ve programlanmış talimatlara göre hareket etmesini sağlar.
Basitçe söylemek gerekirse, şunları kontrol eder:
- Hareket yolları
- Kaynaklama hızı
- Başlangıç ve durdurma zamanlaması
- Konum hassasiyeti
Bu nedenle, robot aynı kaynaklama işlemini yüksek hassasiyetle tekrarlayabilir.
Modern üretimde, kontrol sistemleri aynı zamanda çoklu programları da destekler. Bu, fabrikaların farklı ürünler arasında hızlıca geçiş yapmasına olanak tanır.
Örneğin, bir Juchuang uygulama vakasında, üreticiler ileri düzey kontrol sistemlerini kullanarak kaynaklama parametrelerini kolayca ayarlar, kurulum süresini kısaltır ve üretim esnekliğini artırır.
3. Güç Kaynağı ve Verme Sistemi
Güç sistemi, robotun hareketi için enerji sağlar. Çoğu kaynaklama robotu elektrikli servo motorları kullanır, ancak bazı sistemler hidrolik güç kullanabilir.
Verme sistemi, bu gücü robotun her bir eklemine iletir. İşlem sırasında sorunsuz hareket ve doğru konumlandırmayı sağlar.
Özellikle sürekli üretim ortamlarında tutarlı performansı sürdürmek için stabil bir güç ve verme sistemi esastır.
Güvenilir güç teslimi olmadan, robot hassas kaynaklama görevlerini yerine getiremez.
4. Kaynaklama Süreç Sistemi: Temel Çalışma Birimi
Kaynaklama süreç sistemi, gerçekten kaynaklama işlemini gerçekleştiren kısımdır.
Birkaç önemli bileşeni içerir:
- Kaynaklama güç kaynağı
- Tel besleme sistemi
- Korumalı gaz tedarik sistemi
- Kaynaklama torcu
Bunların her biri kaynaklama sürecinde önemli bir rol oynar.
Güç kaynağı, kaynaklama akımını ve voltajı kontrol eder. Tel besleyici, kaynaklama telini sorunsuz bir şekilde teslim eder. Gaz sistemi, kaynak alanını kirlilikten korur. Kaynaklama torcu, arkı iş parçasına yönlendirir.
Juchuang kaynaklama çözümlerinde, bu bileşenler birlikte çalışmak üzere optimize edilmiştir. Bu, ark stabilitesini提高 eder, damlama miktarını azaltır ve genel kaynak kalitesini artırır.
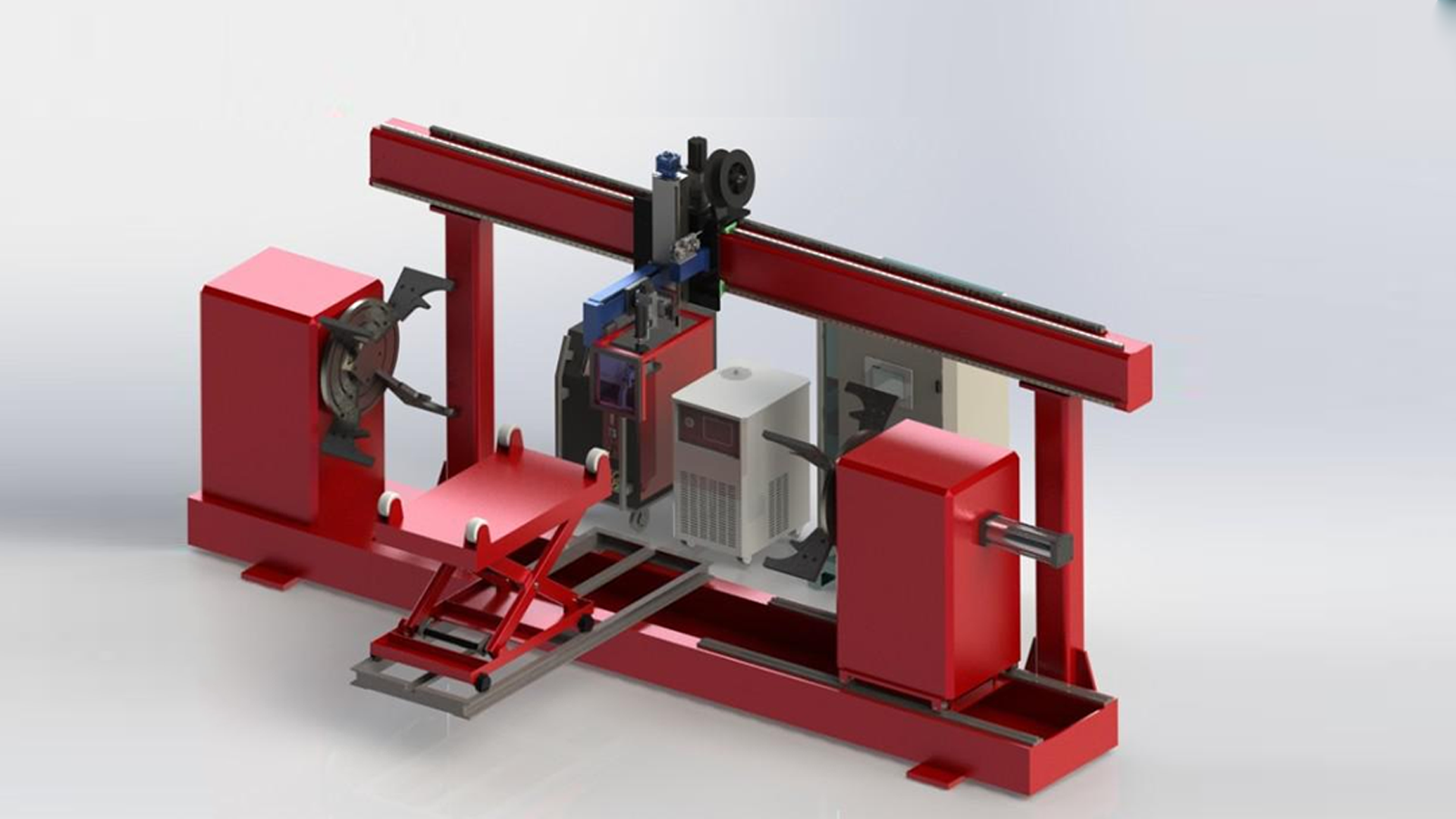
5. Yan Sanayi Ekipmanları: Sistemi Destekleyen
Ana bileşenlerin yanı sıra, kaynaklama robotları etkili bir şekilde çalışmak için destekleyici ekipmanlar gerektirir.
Bunlar şunları içerebilir:
- Konumlandırıcılar ve tutucular
- Güvenlik koruma sistemleri
- Sıfırlama sistemleri
- Sensörler ve izleme cihazları
Bu yan sanayi ekipmanları, güvenli çalışmayı, doğru konumlandırmayı ve verimli üretimi sağlamaya yardımcı olur.
Uygun yan sanayi ekipmanı olmadan, yüksek kaliteli bir robot bile en iyi performansı gösteremez.
6. Altı Eksen Yapısı ve Önemi
Bugün kullanılan çoğu kaynaklama robotu altı eksenli eklemlı robotlardır.
Her bir eksenin belirli bir işlevi vardır:
- 1–3. eksenler, robot kolunun konumunu kontrol eder
- 4–6. eksenler, kaynaklama torcunun yönelimini kontrol eder
Bu tasarım, robotun farklı açıları ve konumları kolayca ulaşmasına olanak tanır.
Sonuç olarak, çeşitli endüstrilerde hem basit hem de karmaşık kaynaklama görevlerini yerine getirebilir.
7. Juchuang Bütünleşik Kaynaklama Robot Çözümleri Uygulamada
Gerçek endüstriyel uygulamalarda, bir kaynaklama robotunun performansı tüm bileşenlerin ne kadar iyi birlikte çalıştığına bağlıdır.
Juchuang kaynaklama otomasyon çözümlerine dayanarak, birçok fabrika bütünleşik tasarım yoluyla üretim sistemlerini geliştirdi.
Örneğin, Juchuang kaynaklama sistemlerini kullanan bir imalat şirketi, sistem koordinasyonunun kötü olması nedeniyle kaynak kalitesinin tutarsızlığı ve çalışmanın kararsızlığı gibi sorunlarla karşılaştı.
Tam Juchuang çözümüne yükseltildikten sonra, şunları içeren:
- Yüksek hassasiyetli robot gövdesi
- İleri düzey kontrol sistemi
- Optimize edilmiş kaynaklama süreç ekipmanı
- Koordineli yan sanayi cihazları
fabrika daha sorunsuz üretim ve daha iyi kaynaklama tutarlılığı elde etti.
Ayrıca, tüm bileşenler tek bir sistem olarak çalışmak üzere tasarlandığı için bakım daha kolay hale geldi.
Bu, entegrasyonun tek tek bileşenler kadar önemli olduğunu gösterir.

